
VineTech Yield Prediction Rover
Developed an autonomous yield prediction rover using the FarmNG Amiga platform. Integrated GoPro cameras for large-scale image data collection and enabled programmatic control via OpenGoPro on the rover’s Ubuntu-based system. Prioritized reliability, modular design, and field usability.
- Built data collection pipeline using GoPro cameras and onboard compute
- Implemented remote camera control via OpenGoPro API
- Designed for real-world agricultural deployment and reliability
Embedded Systems • Python • Robotics • ROS • OpenGoPro API • Wireless Communication • Machine Learning
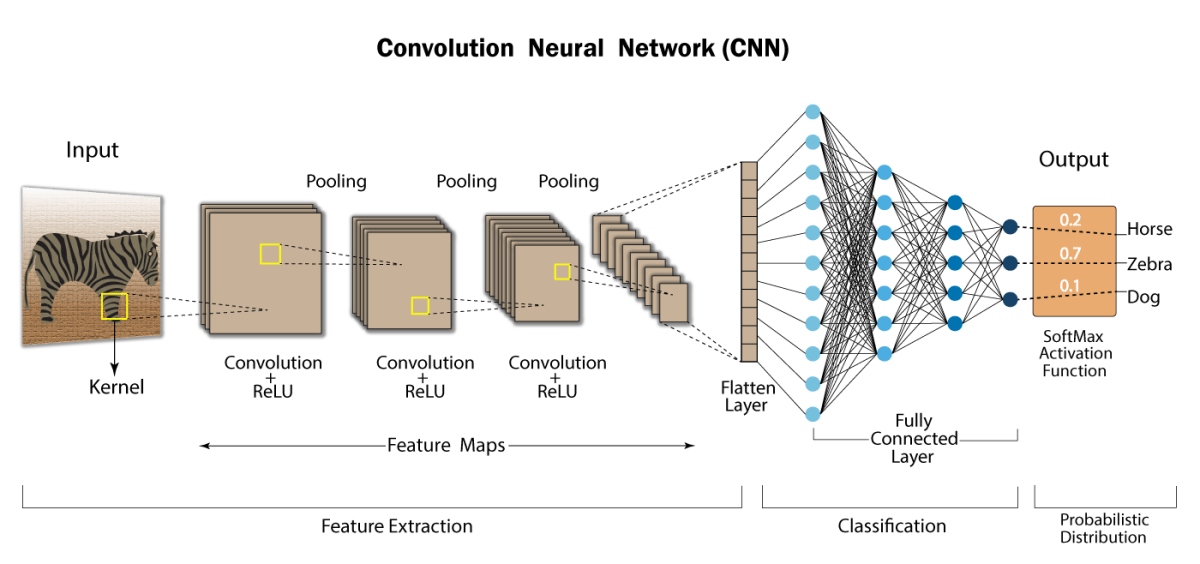
Convolutional Neural Network - CIFAR-10
Designed and optimized a Convolutional Neural Network (CNN) to classify images from the CIFAR-10 dataset. Focused on hyperparameter tuning to improve model accuracy and understand performance tradeoffs in deep learning systems.
- Trained CNN on 60,000 labeled images across 10 categories
- Systematically tuned epochs, batch size, learning rate, and kernel size
- Achieved ~77% accuracy with optimized configuration
- Identified optimal parameters: 30 epochs, batch size 32, learning rate 0.001, kernel size 3x3
Python • TensorFlow/Keras • Machine Learning • Computer Vision • Hyperparameter Optimization
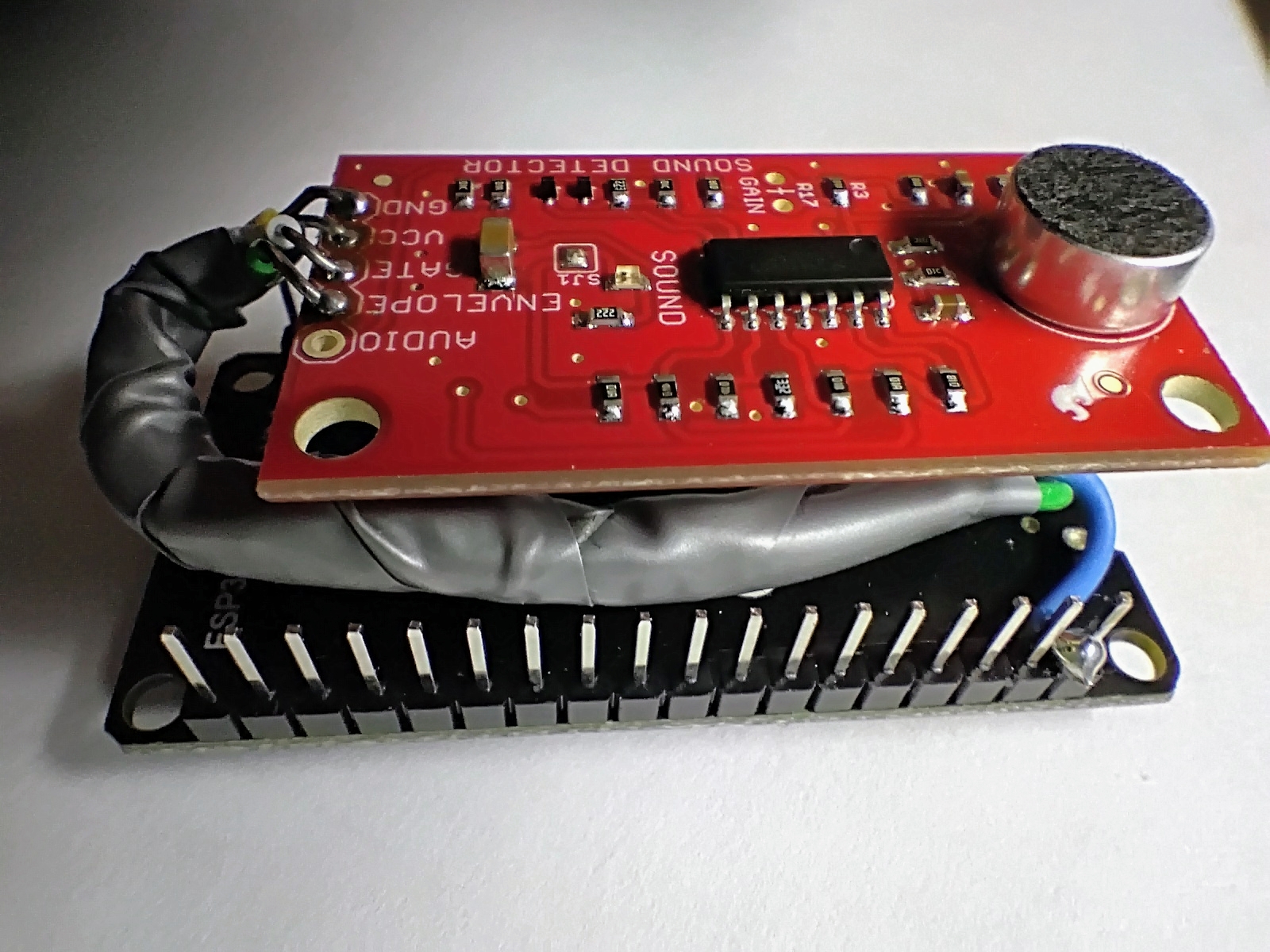
Decibel Detector (IoT Noise Monitor)
Developed an IoT-based noise monitoring device to measure and report sound levels in study environments. Implemented real-time data transmission to the cloud for remote monitoring and analysis.
- Built sensor-based system to capture and process decibel levels
- Transmitted data using MQTT protocol to AWS cloud services
- Gained hands-on experience with IoT communication and cloud integration
JavaScript • AWS • MQTT • IoT • Cloud Integration
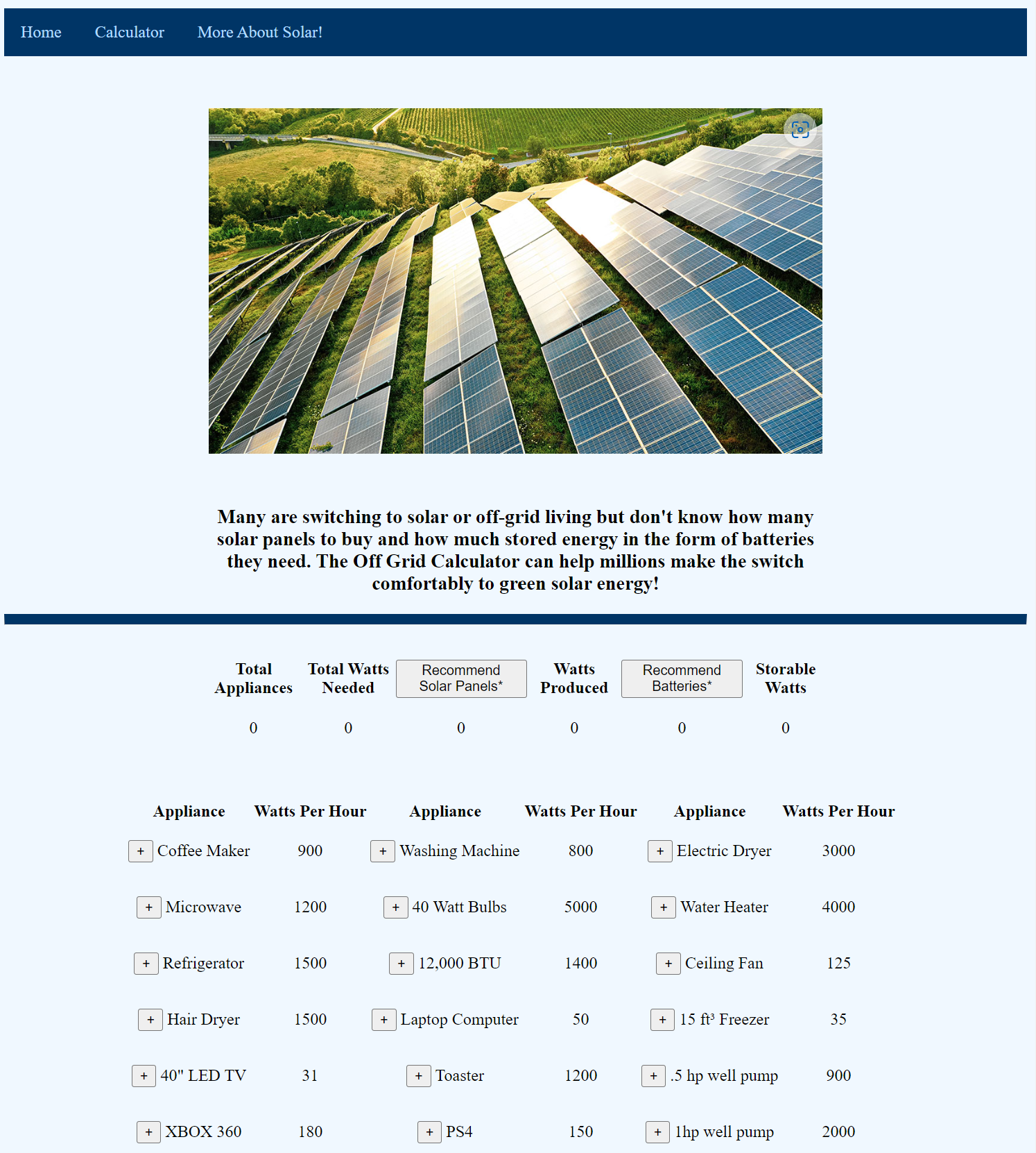
Off-Grid Calculator
Web application to estimate solar panel and battery requirements based on user-defined energy consumption, helping users plan off-grid power systems.
- Calculated energy needs from appliance usage inputs
- Estimated required solar generation and battery storage capacity
- Designed intuitive UI for accessibility to non-technical users
JavaScript • CSS • HTML • Web Development
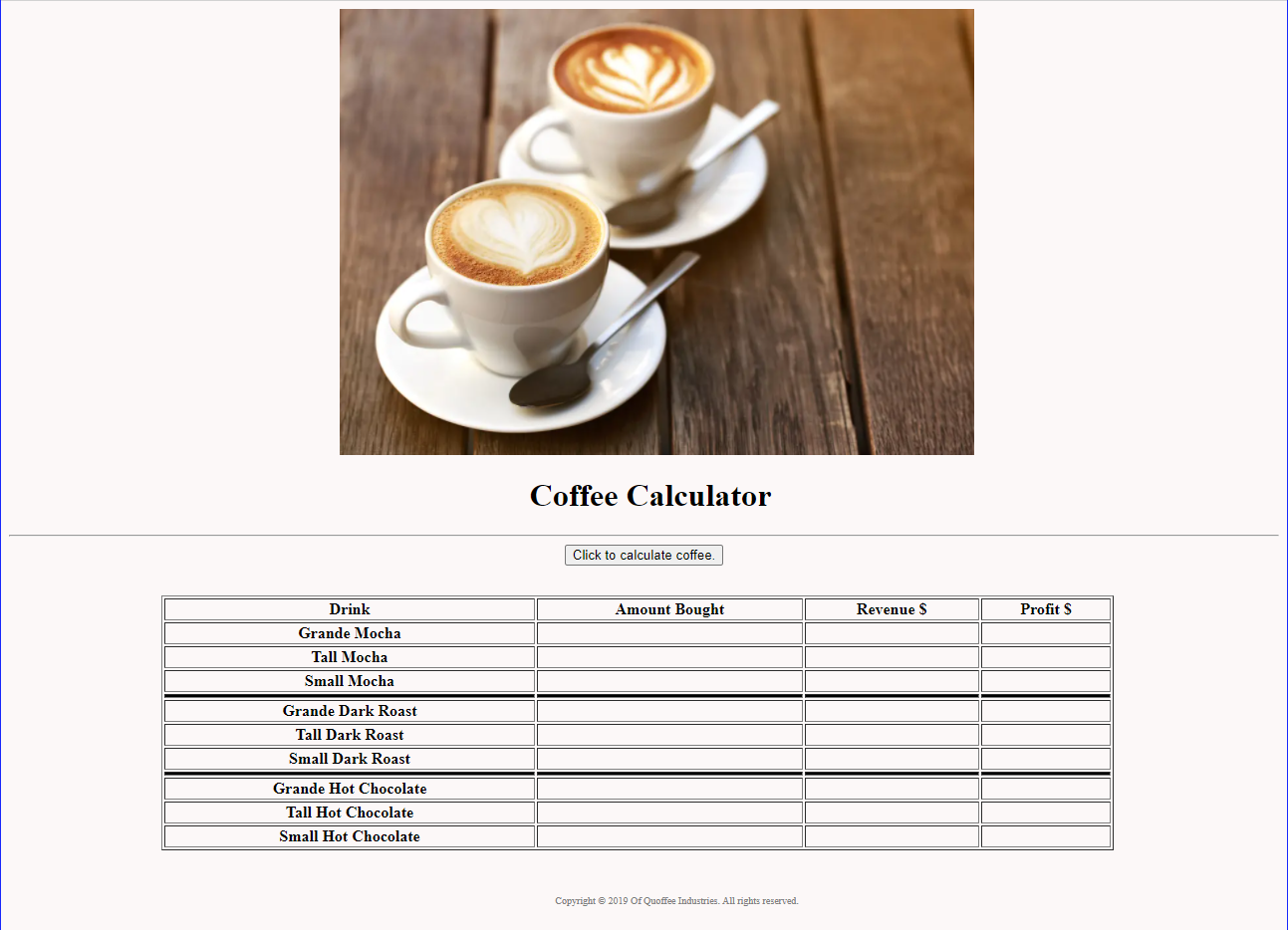
Coffee Shop Profit Calculator
Collaborated on a web-based tool to help small coffee shops estimate profit margins and manage inventory. Served as project manager using the SCRUM framework, coordinating development and design.
- Led project planning and task coordination for team development
- Implemented profit estimation based on cost and sales inputs
- Designed features to assist with inventory tracking
JavaScript • HTML • Team Leadership • Project Management